PID regulator: opis, sastav, podešavanje
Vrlo često, za sistemske procese, nužno je da kontrolirani parametar (npr. Temperatura ili brzina vrtnje) može odmah reagirati na vanjske utjecaje i istodobno održavati druge vrijednosti konstanti sustava, kao što su tlak, protok, itd. Kao primjer, sustav koji sadrži nekoliko ventila za odvodnju. Za održavanje konstantnog jednolikog protoka na svakom ventilu, tlak u cjevovodu mora biti konstantan. ako crpke sustava zatim pogon u vozilu 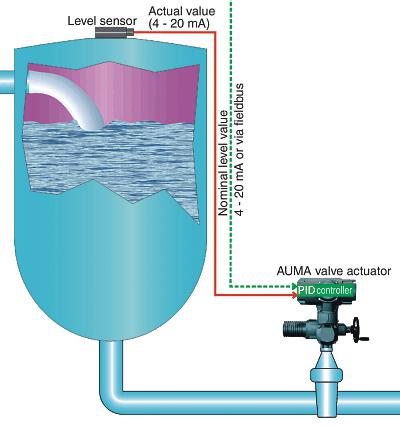 Otvarajući jedan ili više ventila, mora se povećati brzina motora, au slučaju zatvaranja - niža. Tako će se u sustavu održavati stalni tlak. Da bi se osigurao takav rad, potreban je PID regulator. Tlak u sustavu mjeri se pomoću senzora i uspoređuje s podešenom vrijednošću. Prema rezultatima usporedbe, PID regulator kontrolira brzinu motora. U ovom članku ćemo pogledati što čini takav uređaj.
Otvarajući jedan ili više ventila, mora se povećati brzina motora, au slučaju zatvaranja - niža. Tako će se u sustavu održavati stalni tlak. Da bi se osigurao takav rad, potreban je PID regulator. Tlak u sustavu mjeri se pomoću senzora i uspoređuje s podešenom vrijednošću. Prema rezultatima usporedbe, PID regulator kontrolira brzinu motora. U ovom članku ćemo pogledati što čini takav uređaj.
Od čega se sastoji PID regulator?
Kako bi se uklonile pogreške u sustavu, gore spomenuti uređaj sastoji se od tri komponente: integralnog, diferencijalnog i proporcionalnog regulatora. Proporcionalni uređaj je osnovni gdje je referenca brzine proporcionalna pogrešci. Međutim, ako se koristi samo ova komponenta, tada će pogreška uvijek biti prisutna u sustavu. Visoke vrijednosti ovog uređaja dovode do fluktuacija i nestabilnosti sustava, a niske vrijednosti - do "letargije". Za uklanjanje pogrešaka koristi se integralni uređaj. Brzina se povećava do trenutka uklanjanja pogreške (s negativnom pogreškom - smanjuje se). Relativno male vrijednosti integralne komponente imaju značajan utjecaj na rad uređaja kao cjeline. Ako je postavljen previsoko, sustav će početi raditi s prekoračenjem. Diferencijalni uređaj procjenjuje brzinu promjene pogrešaka, koristi se za povećanje brzine sustava. Međutim, kako se brzina regulatora povećava, razina prelijevanja se povećava, što može dovesti do nestabilnosti sustava. Najčešće je ova komponenta postavljena na vrijednost blizu nule, ali može biti vrlo korisna u sustavu pozicioniranja. PID kontroler je dobio ime po prvim slovima ove tri komponente. Kao što se može vidjeti iz opisa uređaja, važan uvjet za ispravan rad uređaja je njegovo otklanjanje pogrešaka. 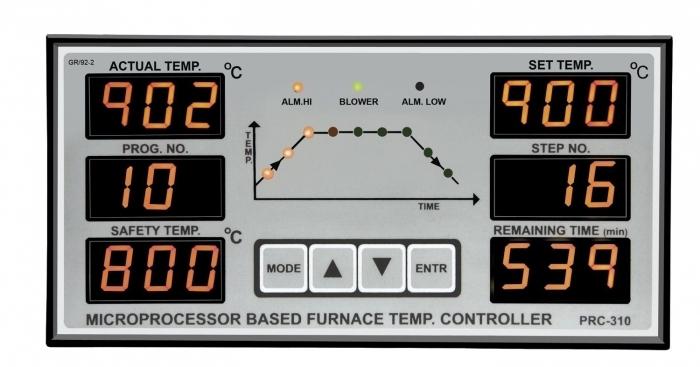
PID upravljačka postavka
Za svaki sustav, postavljanje uređaja provodi se pojedinačno, ovdje razmatramo osnovne preporuke koje su zajedničke različitim situacijama:
1. Postavite diferencijalne i integralne komponente na nulu. Postavite maksimalnu brzinu i promatrajte reakciju.
2. Povećajte proporcionalnu komponentu i ponovite prvi odlomak. Nastavite ovaj postupak dok ne započne proces automatskog osciliranja.
3. Smanjite ovu komponentu na stabilnost sustava.
4. Postavite vrijednost proporcionalne komponente na 15% ispod održive.
5. Postavite maksimalnu vrijednost stupnjevite brzine promjenom integralne komponente.
6. Obično diferencijalni regulator ne treba podešavati.
7. Provjerite stabilnost sustava. 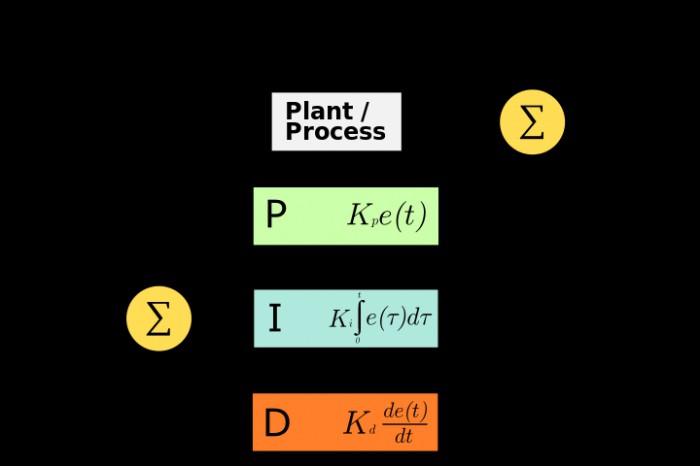
zaključak
Korištenje takvih uređaja u tehnologiji je vrlo široko, koriste se u gotovo svim područjima ljudske djelatnosti. Na primjer PID regulator temperature prisutan je u električnom kuhalu ili u osobnom računalu (u računalu je potrebno podesiti brzinu vrtnje ventilatora dok se povećava CPU temperature).