Trenutak inercije: formula. Trenutak inercije tijela
Za promjenu brzine kretanja tijela u prostoru potrebno je uložiti malo truda. Ova činjenica vrijedi za sve vrste mehaničkih pokreta i povezana je s prisutnošću inercijskih svojstava predmeta koji imaju masu. U članku se razmatra rotacija tijela i daje se pojam njihovog momenta inercije.
Što je rotacija u smislu fizike?

Odgovor na ovo pitanje može svima dati, jer se taj fizički proces ne razlikuje od njegova pojma u svakodnevnom životu. Proces rotacije je kretanje objekta s konačnom masom duž kružne staze oko neke imaginarne osi. Mogu se dati sljedeći primjeri rotacije:
- Kretanje kotača automobila ili bicikla.
- Rotacija lopatica helikoptera ili ventilatora.
- Kretanje našeg planeta oko osi i oko sunca.
Koje fizikalne veličine karakteriziraju proces rotacije?
Kružno gibanje opisano je skupom veličina u fizici, od kojih su glavne navedene u nastavku:
- r je udaljenost do osi materijalne točke mase m.
- ω i α su kutna brzina odnosno ubrzanje. Prva vrijednost pokazuje koliko radijana (stupnjeva) tijelo rotira oko osi u jednoj sekundi, a druga vrijednost opisuje brzinu promjene tijekom vremena prve.
- L je kutni moment, koji je sličan sličnoj karakteristici u linearnom gibanju.
- I - trenutak inercije tijela. O toj se vrijednosti detaljno raspravlja u nastavku.
- M je trenutak sile. Karakterizira stupanj promjene vrijednosti L, ako se primijeni vanjska sila.
Te su veličine međusobno povezane sljedećim formulama rotacijskog gibanja:
L = I * ω
M = I * a
Prva formula opisuje kružna kretanja tijela u odsutnosti djelovanja vanjskih trenutaka sila. U navedenom obliku odražava zakon očuvanja kutnog momenta L. Drugi izraz opisuje slučaj ubrzanja ili usporavanja rotacije tijela kao posljedice djelovanja momenta sile M. Oba izraza često se koriste pri rješavanju problema dinamike duž kružne putanje.
Kao što se može vidjeti iz ovih formula, trenutak inercije oko osi (I) u njima se koristi kao određeni koeficijent. Razmotrimo ovu vrijednost detaljnije.
Odakle dolazi vrijednost ja?
U ovom odjeljku razmatramo najjednostavniji primjer rotacije: kružni pokret materijalne točke mase m, čija je udaljenost od osi rotacije r. Ova situacija je prikazana na slici.
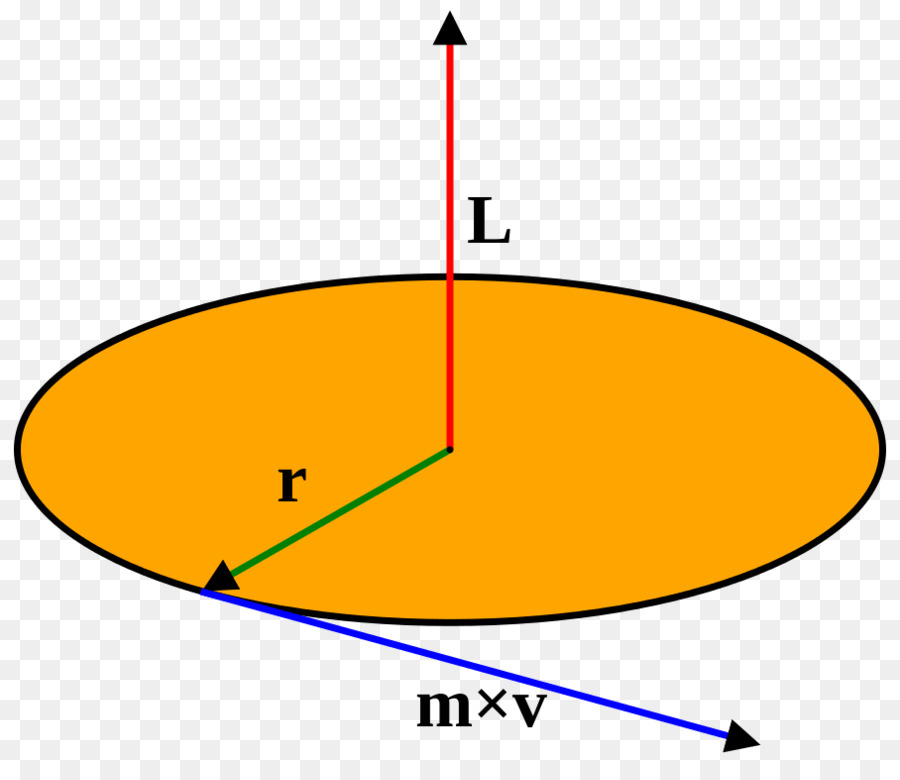
Prema definiciji, kutni moment L zapisuje se kao proizvod rame r linearnim impulsnim p točkama:
L = r * p = r * m * v, budući da je p = m * v
S obzirom da su linearna i kutna brzina međusobno povezane preko udaljenosti r, ta jednakost može se prepisati kao:
v = ω * r => L = m * r 2 * ω
Produkt mase materijalne točke kvadratom udaljenosti do osi rotacije naziva se moment inercije. Gore navedena formula će se u ovom slučaju ponovno napisati na sljedeći način:
I = m * r 2 => L = I * ω
To jest, dobili smo izraz koji je dan u prethodnom paragrafu i uveo vrijednost I.
Opća formula za veličinu tijela I
Izraz za moment inercije s masom m materijalne točke je bazičan, to jest, omogućuje izračun ove vrijednosti za svako tijelo koje ima proizvoljan oblik i nejednoliku distribuciju mase u njemu. Da bi se to postiglo potrebno je predmetni predmet podijeliti na male elemente mase m i (cijeli broj i je broj elementa), a zatim ih pomnožiti kvadratom udaljenosti r i 2 od osi oko koje se razmatra rotacija i dodati rezultate. Opisana metoda pronalaženja vrijednosti I može se matematički napisati na sljedeći način:
I = ( i (m i * r i 2 )
Ako je tijelo podijeljeno na takav način da je i-> ∞, tada se zadana suma zamjenjuje integralom nad masom tijela m:
I = ( m (r 2 x dm)
Ovaj integral je ekvivalentan drugom integralu na volumenu tijela V, jer dV = ρ * dm:
I = ρ * ( V (r 2 * dV)
Sve tri formule koriste se za izračun trenutka inercije tijela. U ovom slučaju, u slučaju diskretne distribucije mase u sustavu, poželjno je koristiti prvi izraz. Uz kontinuiranu raspodjelu mase, primijenite 3. izraz.
Svojstva ja i njezino fizičko značenje
Opisani postupak dobivanja općeg izraza za I omogućuje nam da izvučemo neke zaključke o svojstvima te fizičke veličine:
- ona je aditivna, tj. ukupni trenutak inercije sustava može se prikazati kao zbroj trenutaka pojedinih njegovih dijelova;
- on ovisi o raspodjeli mase unutar sustava, kao io udaljenosti od rotacijske osi, što je posljednje veće, veće I;
- ne ovisi o silama M koje djeluju na sustav trenutaka i na brzinu vrtnje ω.

Fizičko značenje I je koliko sustav sprječava bilo kakvu promjenu brzine vrtnje, tj. Moment inercije karakterizira stupanj "glatkoće" nastalih ubrzanja. Na primjer, kotač za bicikle može se lako okretati do visokih kutnih brzina i također ga je lako zaustaviti, ali da bi se promijenila rotacija zamašnjaka na koljenastom vratilu automobila, potrebno je dosta napora i neko vrijeme. U prvom slučaju postoji sustav s malim momentom inercije, u drugom - s velikim.
Vrijednost I nekih tijela za os rotacije koja prolazi kroz centar mase
Ako primijenimo integraciju preko volumena za sva tijela s proizvoljnom raspodjelom mase, tada možemo dobiti veličinu I. Za homogene objekte koji imaju idealan geometrijski oblik, taj je problem već riješen. U nastavku se navode formule za moment inercije šipke, diska i kugle mase m, u kojoj je njihova sastavna materija ravnomjerno raspoređena:
- Jezgra. Os rotacije radi okomito na nju. I = m * L 2/12, pri čemu je L dužina štapa.
- Disk proizvoljne debljine. Trenutak inercije s osi rotacije, koji prolazi okomito na njegovu ravninu kroz središte mase, izračunava se na sljedeći način: I = m * R 2/2, gdje je R polumjer diska.
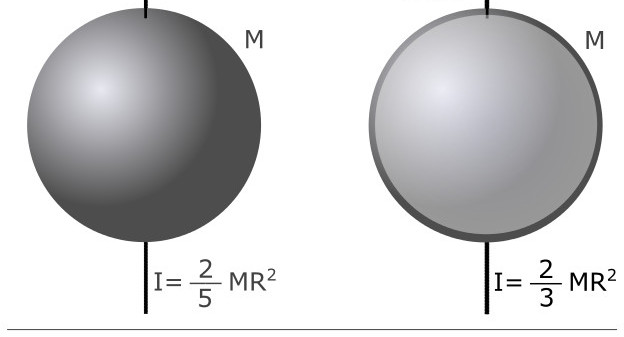
- Kugla. S obzirom na visoku simetriju ove figure, za bilo koji položaj osi koja prolazi kroz njegovo središte, I = 2/5 * m * R2, ovdje je R polumjer lopte.
U nastavku navodimo dva primjera rješavanja problema za primjenu opće formule za izračunavanje I i za korištenje svojstva aditivnosti te veličine.
Zadatak izračuna vrijednosti I za sustav s diskretnom distribucijom mase
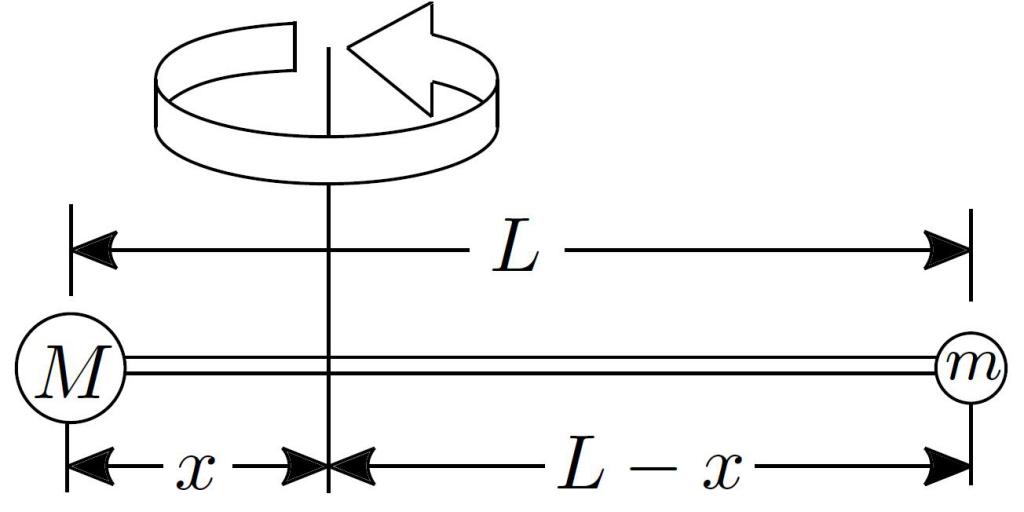
Zamislite šipku dugačku 0,5 metara koja je izrađena od tvrdog i laganog materijala. Ova šipka je fiksirana na osi na takav način da ide okomito na nju točno u sredini. Na ovu šipku su obješene tri utege na sljedeći način: na jednoj strani osovine nalaze se dvije utezi od 2 kg i 3 kg, smještene na udaljenosti od 10 cm odnosno 20 cm od njezinog kraja; s druge strane, jedna težina od 1,5 kg je suspendirana na kraju štapa. Za ovaj sustav potrebno je izračunati trenutak inercije I i odrediti pri kojoj brzini ω će se štap rotirati ako se na jedan od njegovih krajeva na 10 sekundi primijeni sila od 50 N.
Budući da se masa štapa može zanemariti, potrebno je izračunati trenutak I za svako opterećenje i dodati dobivene rezultate kako bi se dobio pun trenutak sustava. Prema stanju zadatka, s osi težina od 2 kg je na udaljenosti od 0,15 m (0,25-0,1), opterećenje od 3 kg je 0,05 m (0,25-0,20), opterećenje od 1,5 kg je 0.25 m. Koristeći formulu za trenutak I. materijalne točke dobivamo:
I = I 1 + I 2 + I 3 = m 1 * r 1 2 + m 2 * r 2 2 + m 3 * r 3 2 = 2 * (0,15) 2 + 3 * (0,05) 2 + 1,5 * (0,25) 2 = 0,14 625 kg * m 2 .
Imajte na umu da su pri izvođenju izračuna sve mjerne jedinice prenesene u sustav SI.
Da bi se odredila kutna brzina rotacije štapa nakon djelovanja sile, treba primijeniti formulu s momentom sile, koja je dana u drugom stavku članka:
M = I * a
Budući da je α = Δω / Δt i M = r * F, gdje je r dužina ramena, dobivamo:
r * F = I * Δω / Δt => Δω = r * F * Δt / I
S obzirom da je r = 0.25 m, zamjenjujemo brojeve u formuli, dobivamo:
Δω = r * F * Δt / I = 0,25 * 50 * 10 / 0,14625 = 854,7 rad / s
Dobivena vrijednost je prilično velika. Da biste dobili uobičajenu brzinu, podijelite Δω na 2 * pi radiana:
f = Δω / (2 xi) = 854.7 / (2 x 3.1416) = 136 s- 1
Tako će primijenjena sila F na kraj šipke s utezima u 10 sekundi okretati je na frekvenciju od 136 okretaja u sekundi.
Izračun vrijednosti I za štap, kada os prolazi kroz njegov kraj
Neka bude homogena šipka mase m i duljine L. Potrebno je odrediti moment inercije, ako je os okretanja smještena na kraju štapa okomito na nju.
Koristimo opći izraz za I:
I = ρ * ( V (r 2 * dV)
Razlučivanjem razmatranog objekta u elementarne volumene, uočavamo da se dV može napisati kao dr * S, gdje je S površina presjeka šipke, a dr je debljina elementa cijepanja. Zamjenjujući ovaj izraz u formulu, imamo:
I = ρ * S * ∫ L (r 2 * dr)
Ovaj integral je vrlo jednostavan za izračunavanje, dobivamo:
I = ρ * S * (r 3/3) L 0 L => I = ρ * S * L 3/3
Budući da je volumen štapa S * L, a masa ρ * S * L, dobivamo konačnu formulu:
Zanimljivo je da je moment inercije za istu šipku, kada os prolazi kroz njegovo središte mase, 4 puta manji od dobivene vrijednosti (m * L 2/3 / (m * L 2/12) = 4).